NuwaUnity : Nuwa Robot SDK for Unity
NuwaUnity : Nuwa Robot SDK for UnityUnity/Android versionInstallScenesMotionTTSTouchLEDMotor controlMotor angle range tableMovement controlLocal ASRCloud Speech To Text and Local ASR mix operationSpeech2TextFaceTrackControl FaceQ & A
###Feature list:
MotionTouchMotorControl FaceLEDTTSin app localcommandSpeed2TextRecognizeFace_trackFace_RecognizeMovementConnection
Unity/Android version
Unity version 2018.4.0 later android SDK Min version : 6.0
Install

After decompress zip file, you can see NuwaUnity_Core.UnityPackage and NuwaUnity_sample.UnityPackage.


drag these package into Unity3D and import these files.

if you got error like namespace "nuwa" could not be found, you may only import NuwaUnity_Sample. import NuwaUnity_Core.UnityPackage to slove the problem
Scenes
All DemoScene are in Assets/NuwaUnity/Scene
Drag all scene from [Assets/NuwaUnity/Scene] into Scene in Build, and set [NuwaUnity/Scene/Demo_Title] as first Scene.
Motion
Unity Scene : Demo_Motion_Play
Nuwa motion file is nuwa's private Robot motion control format. Which is composed of "MP4(Face)", "Motor control", "Timeline control", "LED control", etc. You can just play a motion, and Robot will do a serials of pre-defined actions. PS: Some motions only include "body movements" without "MP4(Face)"
motionPlay(final String motion, final boolean auto_fadein)
- motion: motion name, ex: 666_xxxx
- auto_fadein: Screen will show a Surface Window for motion include Face, the param of "auto_fadein" needs to set as "true"
motionPlay(final String name, final boolean auto_fadein, final String path)
motionPrepare(final String name)
motionPlay( )
motionStop(final boolean auto_fadeout)
- auto_fadeout: stop playing a motion and hide the overlap window as well
getMotionList( )
motionSeek(final float time)
motionPause( )
motionResume( )
motionCurrentPosition( )
motionTotalDuration( )
x// use default NUWA motion asset pathNuwa.motionPlay(string motion_name);// give a specefic motion asset path (internal use only) Nuwa.motionPlay("001_J1_Good", false, "/sdcard/download/001/"); //NOTICE:Please must call motionStop(true), if your auto_fadein is true.// will get callback of onStopOfMotionPlay(String motion)Nuwa.motionStop();// pause, resumeNuwa.motionPause();Nuwa.motionResume();
TTS
Unity Scene : Demo_tts
Robot can speak out a sentance by a giving string
- startTTS(final String tts)
- startTTS(final String tts, final String locale)
- pauseTTS()
- resumeTTS()
- stopTTS()
xxxxxxxxxxNuwa.startTTS("Nice to meet you");// you can cancel speaking at any timeNuwa.startTTS.stopTTS();// or Used specific language speak (Please reference TTS Capability for market difference)Nuwa.startTTS.startTTS(TTS_sample,"en_us");// receive callback onTTSComplete(boolean isError) of VoiceEventListenerNuwa.onTTSComplete += onTTSComplete(boolean isError) {}TTS Capability (Only support on Kebbi Air)
xxxxxxxxxx* Taiwan Market : Locale.CHINESE\Locale.ENGLISH* Chinese Market : Locale.CHINESE\Locale.ENGLISH* Japan Market : Locale.JAPANESE\Locale.CHINESE\Locale.ENGLISH* Worldwide Market : Locale.ENGLISH
Touch
Unity Scene : Demo_Touch
Robot provides Touch events. While you need it, you can request it. You can get TouchEvent Callback from touch head, chest, right hand, left hand, left face, right face.
xxxxxxxxxxprivate void Start(){ Nuwa.onTouchBegan += OnTouchBegin; Nuwa.onTouchEnd += OnTouchEnd; Nuwa.onTap += OnTap; Nuwa.onLongPress += OnLongPress;}// type: head: 1, chest: 2, right hand: 3, left hand: 4, left face: 5,right face: 6.public void OnTouchBegin(Nuwa.TouchEventType type){}public void OnTouchEnd(Nuwa.TouchEventType type){}public void OnTap(Nuwa.TouchEventType type){}public void OnLongPress(Nuwa.TouchEventType type){}LED
Unity Scene : Demo_LED
There are 4 parts of LED on Robot. API can contorl each them. (Head, Chest, Right hand, Left hand) Each LED part has 2 types of modles - "Breath mode" and "Light on mode" Before using it, you need to use API to turn on it first, and turn off it while unneeded. LED default controled by System. If the App wants to have different behavior, it can be disabled by disableSystemLED() If your App needs to control Robot LED, App needs to call disableSystemLED() once,and App call enableSystemLED() while App is in onPause state.
xxxxxxxxxxNOTICE : Kebbi-air not support FACE and Chest LED Breath mode.
- enableLed(final int id, final int onOff)
- setLedColor(final int id, final int brightness, final int r, final int g, final int b)
- enableLedBreath(final int id, final int interval, final int ratio)
- enableSystemLED() // LED be controlled by Robot itself
- disableSystemLED() // LED be controlled by App
xxxxxxxxxx/*id:1 = Face LEDid:2 = Chest LEDid:3 = Left hand LEDid:4 = Right hand LEDonOff: 0 or 1brightness, Color-R, Color-G, Color-B: 0 ~ 255interval: 0 ~ 15ratio: 0 ~ 15*///disable system led,Nuwa.disableSystemLED();//use this to control led by appNuwa.enableLed(Nuwa.LEDPosition, bool);Nuwa.setLedColor(Nuwa.LEDPosition , Color);//設定部位的LED顏色// turn on LEDNuwa.enableLed(1, 1);Nuwa.enableLed(2, 1);Nuwa.enableLed(3, 1);Nuwa.enableLed(4, 1);// Set LED colormRobot.setLedColor(1, 255, 255, 255, 255);mRobot.setLedColor(2, 255, 255, 0, 0);mRobot.setLedColor(3, 255, 166, 255, 5);mRobot.setLedColor(4, 255, 66, 66, 66);// Switch to "Breath mode"mRobot.enableLedBreath(1, 2, 9);// turn off LEDmRobot.enableLed(1, 0);mRobot.enableLed(2, 0);mRobot.enableLed(3, 0);mRobot.enableLed(4, 0);
Motor control
Unity Scene : Demo_Motor
Mibo Robot has 10 motors, use the API, you can control each of them
ctlMotor(final int motorid, final int speed, final float setPositionInDegree, final float setSpeedInDegreePerSec)
motorid:
- neck_y:1
- neck_z:2
- right_shoulder_z:3
- right_shoulder_y:4
- right_shoulder_x:5
- right_bow_y:6
- left_shoulder_z:7
- left_shoulder_y:8
- left_shoulder_x:9
- left_bow_y:10
speed: always 0
setPositionInDegree: target positon in degree
setSpeedInDegreePerSec: speed in degree per sec (range: 0 ~ 200)
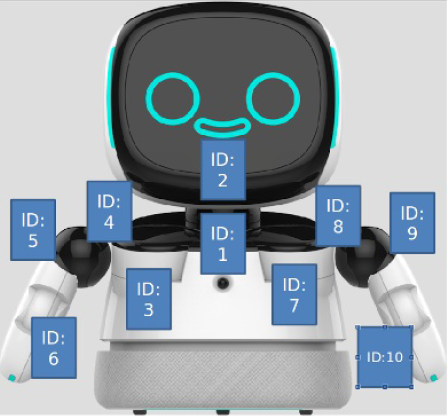
Motor angle range table
xxxxxxxxxx| ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 ||---|----|----|----|----|----|----|----|----|---|----||Max| 20 | 40 | 5 | 70 | 100| 0 | 5 | 70 |100| 0 ||Min|-20 |-40 | -85|-200| -3 |-80 |-85 |-200|-3 |-80 |
Example:
xxxxxxxxxx//Get neck_y Motor DegreeNuwa.getMotorPresentPossitionInDegree(Nuwa.NuwaMotorType.neck_y)//get motor degreeNuwa.setMotorPositionInDegree((int)type, (int)motorRotateDegree, (int)motorSpeed);
Movement control
Unity Scene : Demo_movement
To control Robot to forward, backwards, turns, stop
Low level control:
- move(float val) max: 0.2(Meter/sec) go forward, min: -0.2(Meter/sec) go back
- turn(float val) max: 30(Degree/sec) turn left, min: -30(Degree/sec) turn right
Advanced control:
- forwardInAccelerationEx()
- backInAccelerationEx()
- stopInAccelerationEx()
- turnLeftEx()
- turnRightEx()
- stopTurnEx()
// go forward
Nuwa.forwardInAccelerationEx();
// go back
Nuwa.backInAccelerationEx();
// stop
Nuwa.stopInAccelerationEx();
Local ASR
Demo_LocalCommand
ASR engine use SimpleGrammarData to describe the list of keyword, App needs to create Grammar first. (Command table)
- createGrammar(final String grammar_id, final String grammar_string)
- startLocalCommand()
- stopListen()
Example:
- prepare Grammer Info
strin mi_Name; //grammer's title, you can set value you like
string[] values; //string to recognize
/*
mi_Name = "robot";
values = new string[2] {"hello","how are you"};
*/
Nuwa.prepareGrammarToRobot(mi_Name, values);
- Register Event callback
Nuwa.onGrammarState += OnGrammarState; // OnSetup Grammer Finish
Nuwa.onLocalCommandComplete += TrueFunction; //get complete event
Nuwa.onLocalCommandException += FalseFunction; //get exception event
3.After get on GrammerState Event Callback, start localcommand
void OnGrammarState(bool isError, string info)
{
Debug.Log(string.Format("OnGrammarState isError = {0} , info = {1}", isError, info));
//start LocalCommand
Nuwa.startLocalCommand();
}
You can get Json from onLocalCommandComplete Event, the json file should look like this:
{
"result": "測試",
"x-trace-id": "ef73bd1252544f30a818b0f68a6a72c7",
"engine": "IFly local command",
"type": 1,
"class": "com.nuwarobotics.lib.voice.ifly.engine.IFlyLocalAsrEngine",
"version": 1,
"extra": {
"content": "String"
},
"content": "{\n \"sn\":1,\n \"ls\":true,\n \"bg\":0,\n \"ed\":0,\n \"ws\":[{\n \"bg\":0,\n \"cw\":[{\n \"w\":\"測試\",\n \"gm\":0,\n \"sc\":67,\n \"id\":100001\n }],\n \"slot\":\"<NuwaQAQ>\"\n }],\n \"sc\":68\n}"
}
If the returned JSON file is empty, it means that the requested input content was not recognized.
Cloud Speech To Text and Local ASR mix operation
Unity Scene : Demo_MixUnderstand
While doing ASR Mix mode, engine will receive results from local and cloud, engine will only return one of both. Rules are:
- if engine get local result, it will only return local result
- if engine get no local result, it will return ASR result if Internet is available
PS: Cloud ASR and local ASR result are json format string.
createGrammar(final String grammar_id, final String grammar_string)
startMixUnderstand( )
- The local result is returned first. If there is no local result, the cloud NLP result will be returned. The grammar table must be built before use the api
stopListen( )
Example:
- prepare Grammer Info
strinExceptiong mi_Name; //grammer's title, you can set value you like
string[] values; //string to recognize
/*
mi_Name = "robot";
values = new string[2] {"hello","how are you"};
*/
Nuwa.prepareGrammarToRobot(mi_Name, values);
- Register Event callback
Nuwa.onGrammarState += OnGrammarState; //Get Grammer setup complete
Nuwa.onMixUnderstandComplete += MixUnderstandFunction; //get mixunderstand result
Nuwa.onLocalCommandComplete += TrueFunction; //get localcomand complete
Nuwa.onLocalCommandException += FalseFunction; //get localcommand exception
3.After get on GrammerState Event Callback, call start localcommand
void OnGrammarState(bool isError, string info)
{
Nuwa.startLocalCommand();
}
You can get Json from onLocalCommandComplete Event, the LocalCommand json file should look like this:
{
"result": "測試",
"x-trace-id": "2ed6670726b47c5a3ac006aafa9216d",
"engine": "Google Cloud",
"type": 1,
"class": "com.nuwarobotics.lib.voice.hybrid.engine.NuwaTWMixEngine",
"version": 1,
"extra": {
"content": "String"
},
"content": "{\"sn\":1,\"ls\":true,\"bg\":0,\"ed\":0,\"ws\":[{\"bg\":0,\"slot\":\"<MiboMixunderstand>\",\"cw\":[{\"id\":10001,\"w\":\"測試\",\"sc\":96,\"gm\":0}]}],\"sc\":94}"
}
and mixunderstand's json sould look like this:
{
"result": "123",
"x-trace-id": "e5e37c47dc4649b08cf71015c8d1b69e",
"engine": "Google Cloud",
"type": 2,
"class": "com.nuwarobotics.lib.voice.hybrid.engine.NuwaTWMixEngine",
"version": 1
}
If the returned JSON file is empty, it means that the requested input content was not recognized.
Speech2Text
Unity Scene : Demo_Speech2Text
- set calback:
Nuwa.onSpeech2TextComplete += SpeechCallback;
- Call SpeechToText
Nuwa.setListenParameter(Nuwa.ListenType.RECOGNIZE, "language", "en_us");
Nuwa.setListenParameter(Nuwa.ListenType.RECOGNIZE, "accent", null);
Nuwa.startSpeech2Text(false); //dont need wakeup, set false
The returned string is text and can be used directly.
In addition, this feature requires internet connection. If the Robot's system time is not the same as the time zone of the current location, it is very likely that the returned string will be empty.
FaceTrack
Unity Scene : Demo_FaceTrack
//1. Register Get HumanFaceTrack Event
Nuwa.onTrack += GetTrackData;
//2. send requeset and wait 2 second to get result
Nuwa.startRecognition(Nuwa.NuwaRecognition.FACE);
//3. receive callback and set value
void GetTrackData(Nuwa.TrackData[] data)
{
float _x = float.Parse(data[0].x); //only get first person's face
float _y = float.Parse(data[0].y);
float _w = float.Parse(data[0].width);
float _h = float.Parse(data[0].height);
FaceOriginPos = new Vector2(_x, _y); // set face pos
FaceOriginSize = new Vector2(_w, _h); // set face size
FaceCenterPos = FaceOriginPos + (FaceOriginSize / 2f); // set face center
}
// Received data should look like this:
// {"height":175,"width":175,"x":250,"y":93}
Control Face
Scene : Demo_ControlFace
// use
Nuwa.ShowFace();
Nuwa.HideFace();
Nuwa.MouthOn();
Nuwa.MouthOff();
string motionID; //kebbi's motion id
Nuwa.PlayMotion(motionId);
int x,y; //face window's start pos(x,y)
int w,h; //分別為凱比的寬跟高,凱比臉的正常大小為1024x600
int w,h; //face windows's width and height, the default screen size is 1024*600
Nuwa.ChangeFace(x, y, w, h);
If you want exit app after use ShowFace(), you must need set face's screen size to (1024,600) and call HideFace().
Q & A
Q1: Why it dodn't work while App calls "mRobot.motionPlay("001_J1_Good", true/false)"? Ans:
- check the callback of "public void onErrorOfMotionPlay(int errorcode) to know the error info"
- make sure the motion name is valid
- check the motion list to get the correct motion name
[Kebbi Motion list] https://dss.nuwarobotics.com/documents/listMotionFile
Q2: Why App can not control LED? Ans:
- App needs to call disableSystemLED() once first. Ex: Do it in onCreate() state.
- App needs to call enableSystemLED() while App closed. Ex: Do it in onPause() state.
Q3: Unity got [xxx_gameObject can only be called from the main thread] Exception
- Unity Cannot use Unity's Build in variable and function when Received callback from android, like use xxx.gameobject.SetActive(true/false);
- To slove this problem, you need wait one frame and call it in Update()
- You can use UniRx Plugin to slove this problem. use Observable.NextFrame() to put the part that needs to be executed in the next frame.
https://forum.unity.com/threads/unity-android-main-ui-thread.174553/